NLP mempelajari bagaimana bahasa alami itu diolah sedemikian hingga user dapat berkomunikasi dengan komputer. Konsentrasi ilmu ini adalah interaksi antara komputer dengan bahasa natural yang digunakan manusia, yakni bagaimana komputer melakukan ekstraksi informasi dari input yang berupa natural language dan atau menghasilkan output yang juga berupa natural language, misalnya pada system Automated online assistant seperti gambar 1.3 dan deteksi email spam yang cerdas [7].
Gambar 1.3 Penerapan NLP pada automated online asistant berbasis web
2. Computer VisionCabang ilmu ini erat kaitannya dengan pembangunan arti/makna dari image ke obyek secara fisik. Yang dibutuhkan didalamnya adalah metode-metode untuk memperoleh, melakukan proses, menganalisa dan memahami image. Apabila cabang ilmu ini dikombinasikan dengan Artificial Intelligence secara umum akan mampu menghasilkan sebuah visual intelligence system. Akuisisi dan pemrosesan informasi berupa vision dapat ditampilkan pada gambar 1.4
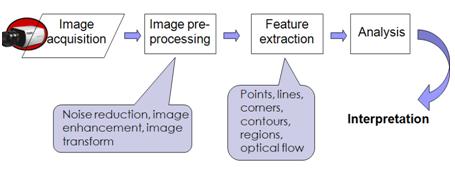
Gambar 1.4 Model persepsi visual pada computer vision

Gambar 1.5 Contoh penerapan computer vision untuk identifikasi wajah
3. Robotika dan Sistem Navigasi
Bidang ilmu inilah yang mempelajari bagaimana merancang robot yang berguna bagi industry dan mampu membantu manusia, bahkan yang nantinya bisa menggantikan fungsi manusia. Robot mampu melakukan beberapa task dengan berinteraksi dengan lingkungan sekitar. Untuk melakukan hal tersebut, robot diperlengkapi dengan actuator seperti lengan, roda, kaki, dll. Kemudian, robot juga diperlengkapi dengan sensor, yang memampukan mereka untuk menerima dan bereaksi terhadap environment mereka Al-Jajari (1136-1206) seorang ilmuwan Islam pada dinasti Artuqid yang dianggap pertama kali menciptakan robot humanoid dimana berfungsi sebagai 4 musisi, hebat kan? Bahkan pada tahun 1796 sudah dihasilkan boneka mekanik bernama Karakuri yang mampu menuangkan air teh atau menulis karakter Kanji yang dibuat oleh Hisashige Tanaka.
Gambar 1.6 Al-Jazari’s programmable automata (Tahun 1206 SM)

Gambar 1.7 Karakuri, rancangan robot dari Jepang adad 16 yang mampu menuang air teh
Ada beberapa istilah penting di dalam robot vision yang saling
berhubungan, diantaranya computer vision, machine vision dan robot
vision. Computer vision merupakan teknologi paling penting di masa yang
akan datang dalam pengembangan robot yang interaktif. Computer Vision
merupakan bidang pengetahuan yang berfokus pada bidang sistem kecerdasan
buatan dan berhubungan dengan akuisisi dan pemrosesan image. Machine
vision merupakan proses menerpakan teknologi untuk inspeksi automatis
berbasis image, kontrol proses dan pemanduan robot pada berbagai
aplikasi industri dan rumah tangga. Robot vision merupakan pengetahuan
mengenai penerapan computer vision pada
robot. Robot membutuhkan informasi vision untuk memutuskan aksi apa
yang akan dilakukan. Penerapan saat ini vision pada robot antara lain
sebagai alat bantu navigasi robot, mencari obyek yang diinginkan,
inspeksi lingkungan dan lainnya. Vision pada robot menjadi sangat
penting karena informasi yang diterima lebih detail dibanding hanya
sensor jarak atau sensor lainnya. Misalnya dengan vision, robot dapat
mengenal apakah obyek yang terdeteksi merupakan wajah orang atau bukan.
Lebih jauh lagi, sistem vision yang canggih pada robot membuat robot
dapat membedakan wajah A dengan wajah B secara akurat (Face recognition
system menggunakan metode PCA, LDA dan lainnya) [6]. Proses pengolahan
dari input image dari kamera hingga memiliki arti bagi robot dikenal
sebagai visual perception, dimulai dari akuisisi image, image
preprocessing untuk memperoleh image yang diinginkan dan bebas noise
misalnya, ekstrasi fitur hingga interpretasi seperti ditunjukkan pada
gambar 1.8. Misalnya saja untuk identifikasi pelanggan dan penghindaran
multiple moving obstacles berbasis vision, atau untuk menggerakan servo
sebagai aktuator untuk mengarahkan kamera agar tetap mengarah ke wajah
seseorang (face tracking) [5].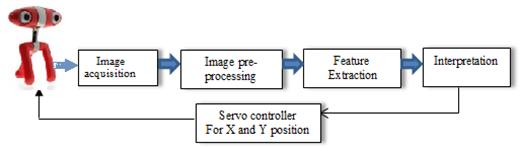
Gambar 1.8 Contoh Model visual perception pada robot[3]
Contoh nyata model service robot berbasis vision (vision-based service robot)
yang dikembangkan penulis bernama Srikandi III yang menggunakan 2 buah
kamera (stereo vision) seperti gambar di bawah, dimana robot dapat
mengirimkan order pesanan minuman ke pelanggan:

(a) (b)
Gambar 1.9 Contoh robotika berbasis kamera
Pada pengembangan selanjutnya, menanamkan kecerdasan buatan yang
komplek pada robot sehingga mampu mengenal dan memahami suara manusia,
perhatian terhadap berbagai gerak lawan bicara dan mampu memberikan
response alami yang diberikan robot ke manusia merupakan tantangan ke
depan untuk membangun robot masa depan.Sumber : https://blog.rumahproject.com/2016/11/27/contoh-penerapan-kecerdasan-buatan-ai-dalam-kehidupan/
Written by Unknown
We are Creative Blogger Theme Wavers which provides user friendly, effective and easy to use themes. Each support has free and providing HD support screen casting.



0 komentar:
Posting Komentar